使用假肢的残疾人常步履蹒跚或被绊倒。最近,卡耐基梅隆大学的研究者开发了一种机械假肢,模仿人类控制腿部的方法,能让使用者在崎岖路面保持平衡。
机器人学助理教授Hartmut Geyer说,他们通过研究人类的反射行为和其他神经肌肉控制系统,设计出了这个控制策略,并在仿真模拟和实验室测试中取得了良好的效果,能够保证崎岖路面的步态稳定,并能迅速从绊倒中恢复平衡。
这个项目已经进行了3年,接下来将在膝盖以上截肢的志愿者身上进行测试。Geyer说,带有动力的假肢可以弥补腿部肌肉的缺失,但是如果截肢患者害怕摔倒,他们就不会使用这种假肢。现在的假肢都在尝试模仿人类的腿部运动,但却很难像健康人腿那样对倾斜、羁绊和推搡做出反应。他们的计划正是致力于研究人类控制四肢的方式,并用其中的原理来建造机械假肢。
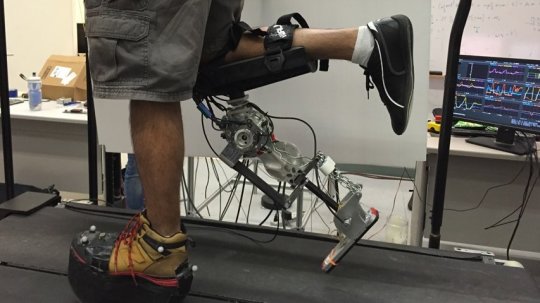
这些原理不仅能帮助截肢患者,还有助于建造足式机器人。最近,在IEEE智能机器人与系统国际会议上,Geyer还展示了利用这种方式制造的行走机器人。在腿部行走的动态和动力控制方面,Geyer已经研究了10年时间。他发现,腿部伸肌通常能让关节伸直。这些肌肉反馈来的力量会自动对地面的干扰做出反应,迅速减缓腿部运动或者将腿伸得更远。Geyer的团队用计算机模拟程序和电缆驱动装置(Robotic Neuromuscular Leg 2)评估了这个神经肌肉模型。结果显示,这个神经肌肉控制方法能够重现正常的人类步伐,并能在腿部前摆和后摆时迅速对干扰做出反应。但是,对中部的摆动尚不能做出有效的反馈,因此他们还需要更进一步的实验和研究。
在美国,有超过100万截肢病人。据预计,这一数字到2050年将翻4倍。约有一半病人报告称他们害怕跌倒,还有大多数人说,不能在崎岖路面行走极大降低了他们的生活质量。动力假肢装配有马达,能够在行走时调整膝盖和脚踝的角度,形成更自然的步伐。这些马达还能产生力量来弥补损失的腿部肌肉,让残疾人行走更加容易和快速。Geyer说,机械假肢是一个新兴领域,有了这些崭新的设计和控制系统,它们将能够帮助解决截肢病人的问题,提升生活质量。
来自sciencedaily,机器之心编译出品。编译:汪汪。







